Problem Statement:
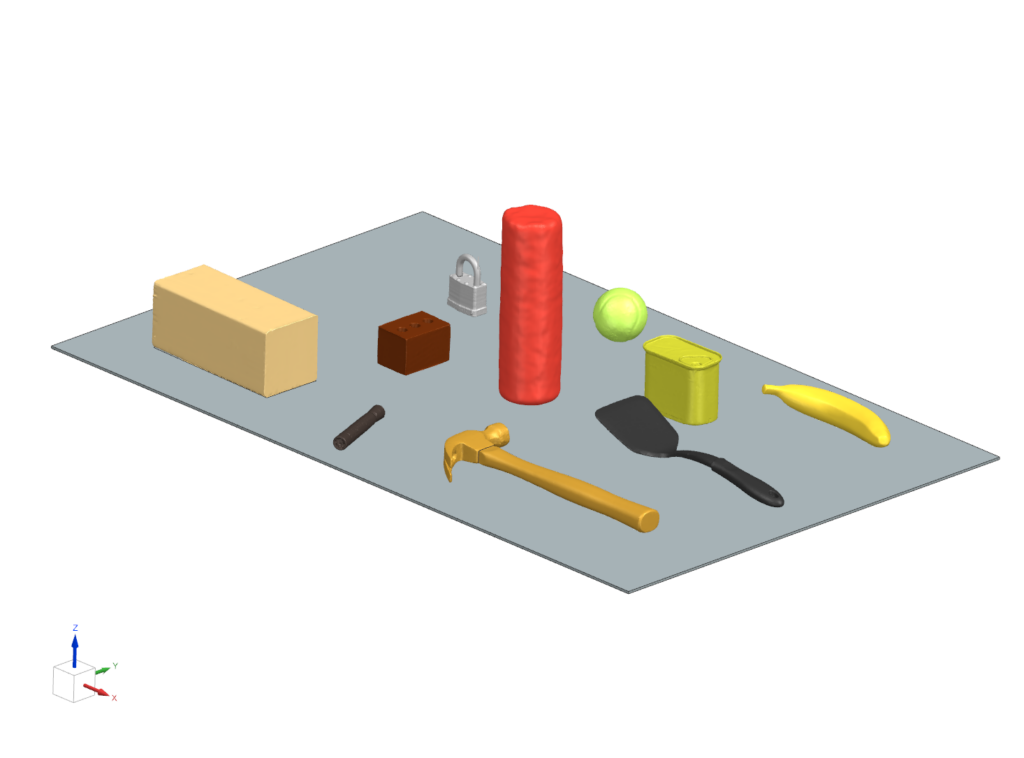
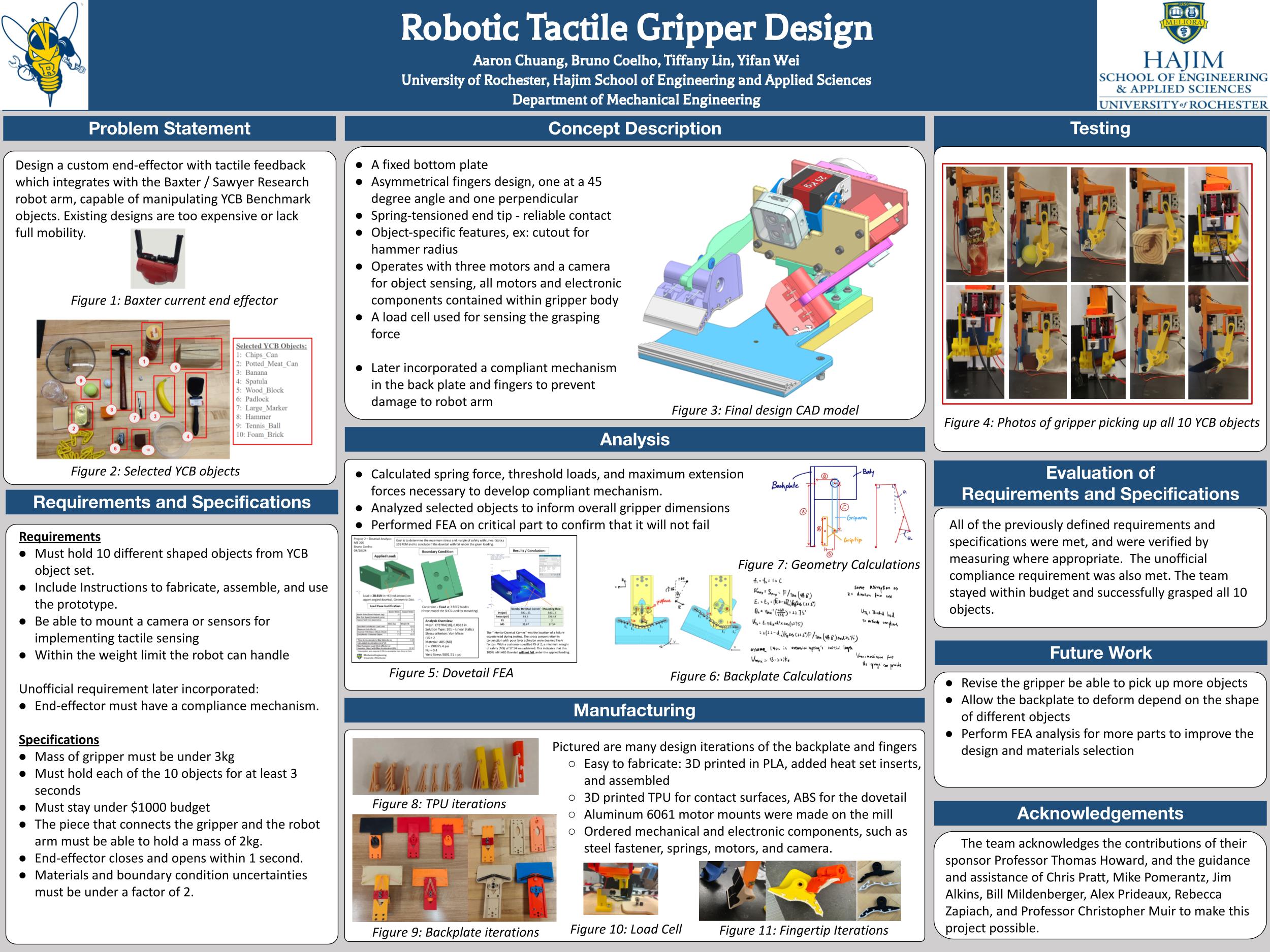
Design a custom end-effector with tactile feedback which integrates with the Baxter / Sawyer Research robot arm, capable of manipulating YCB Benchmark objects. Existing designs are too expensive or lack full mobility.
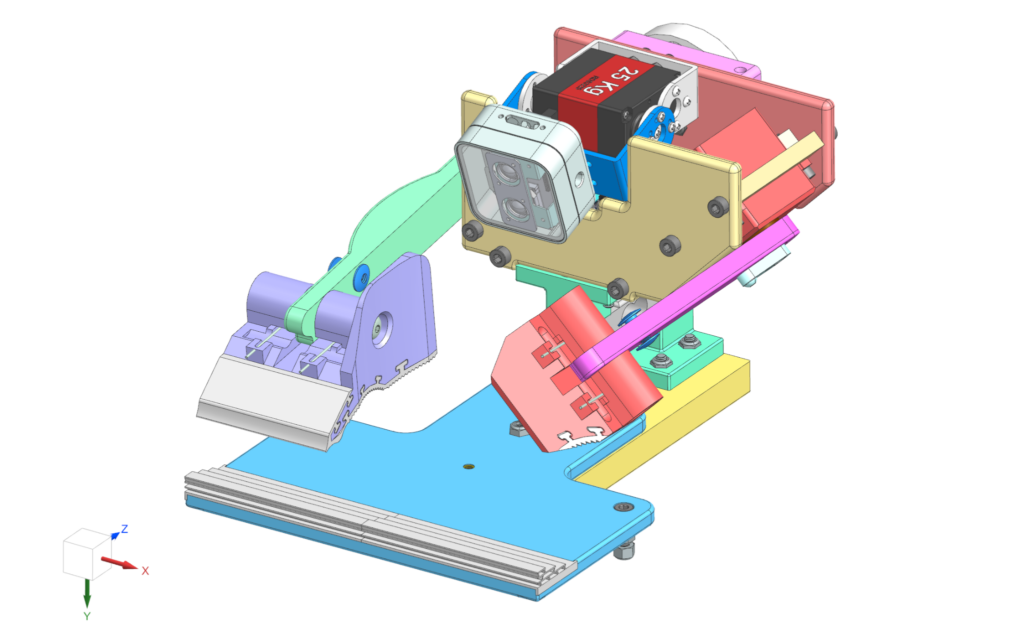
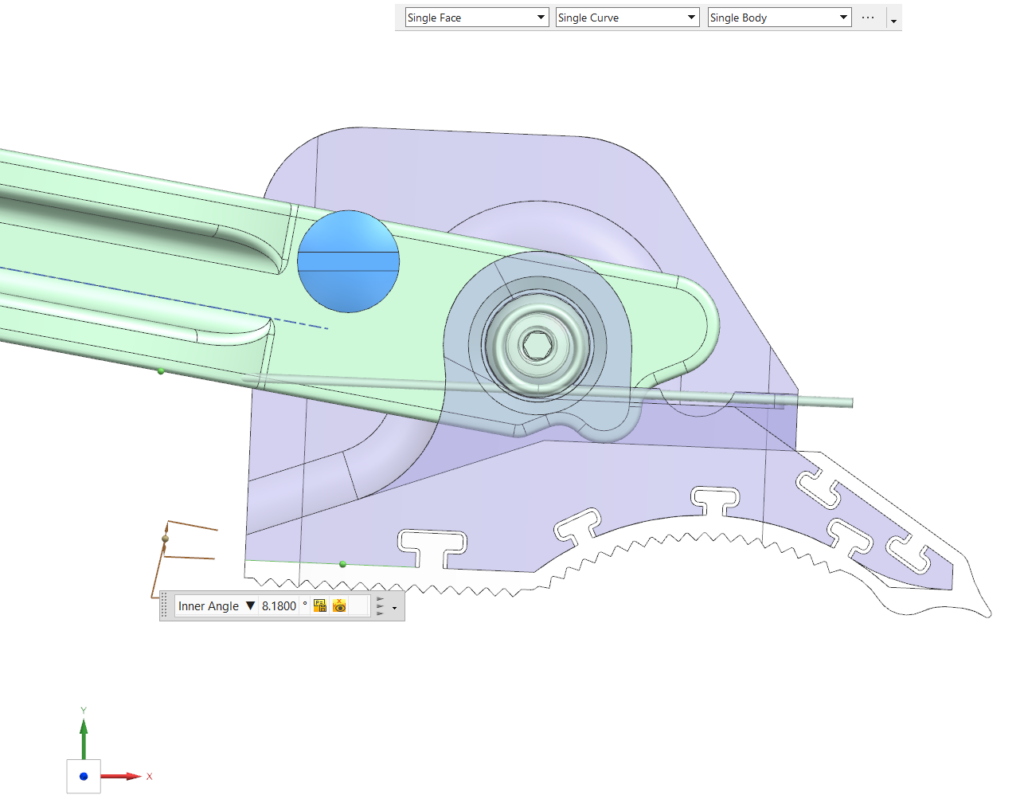
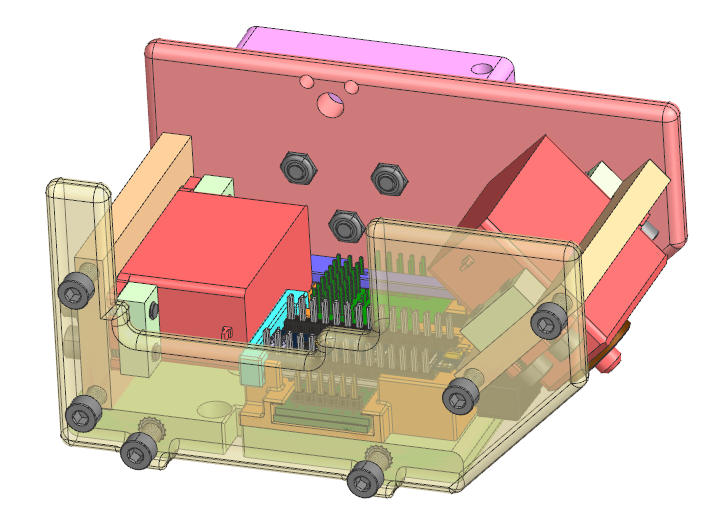
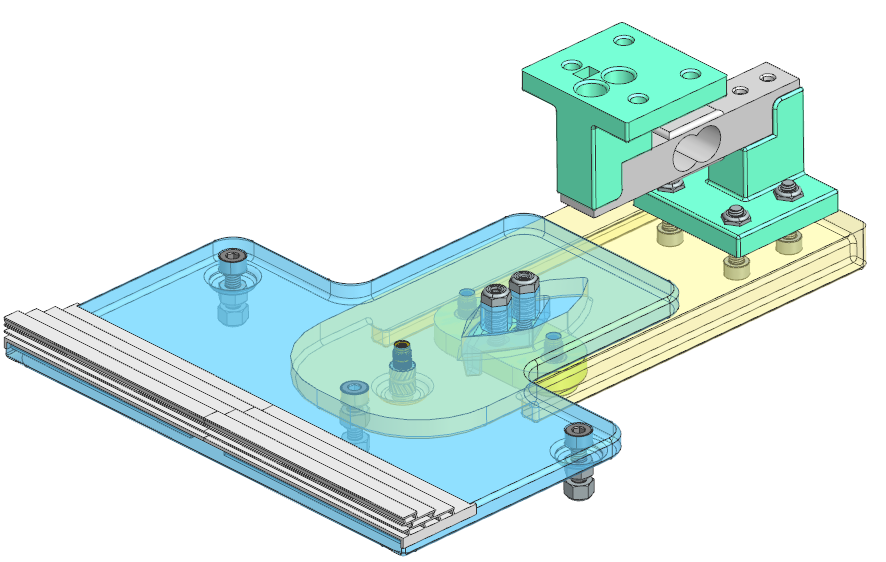
Final Design of Gripper System / YCB Object “Playground” – Siemens NX
Our Team:
Aaron Chuang
Class of 2024
Main Body Design, Mechatronics, System Integration, Manufacturing

Bruno Coelho
Class of 2024
Grip Arm/Tip Design, TPU skin implementation, Gripper geometry optimization

Tiffany Lin
Class of 2024
Manufacturing Drawings, Design, Planning, Purchasing, Technical Writing

Yifan Wei
Class of 2024
Compliant Backplate Design, Design Analysis, Manufacturing
Project Mentors / Sponsor:

Christopher Muir
ME 205 Professor, Project Mentor

Thomas Howard
Project Sponsor

Jim Alkins
Project Manufacturing Adivsor

Rebeca Zapiach
ME205 TA, Project Mentor
Abstract:
In the field of manufacturing, there is often a problem of tasks being too dangerous, difficult, or monotonous for human workers to perform. In order to solve this issue, manufacturing robots are implemented, and must be able to grasp a similar array of objects as a human hand so as to perform the same tasks. A tactile sensing gripper end effector has been designed and prototyped for the Baxter and Sawyer robots to aid in these efforts. At the time of this report, the gripper has successfully been able to grasp all 10 of a varied set of objects. The results indicate that replication of human grasping is possible with a non-hand-shaped end effector and that a truly efficient end effector is able to grasp different objects with the same design.
Project Presentation & Final Design Report:
Gripper Team Presentation – Slides
Gripper Team Presentation – Video
Gripper Team Final Design Report – PDF
Project Highlights:
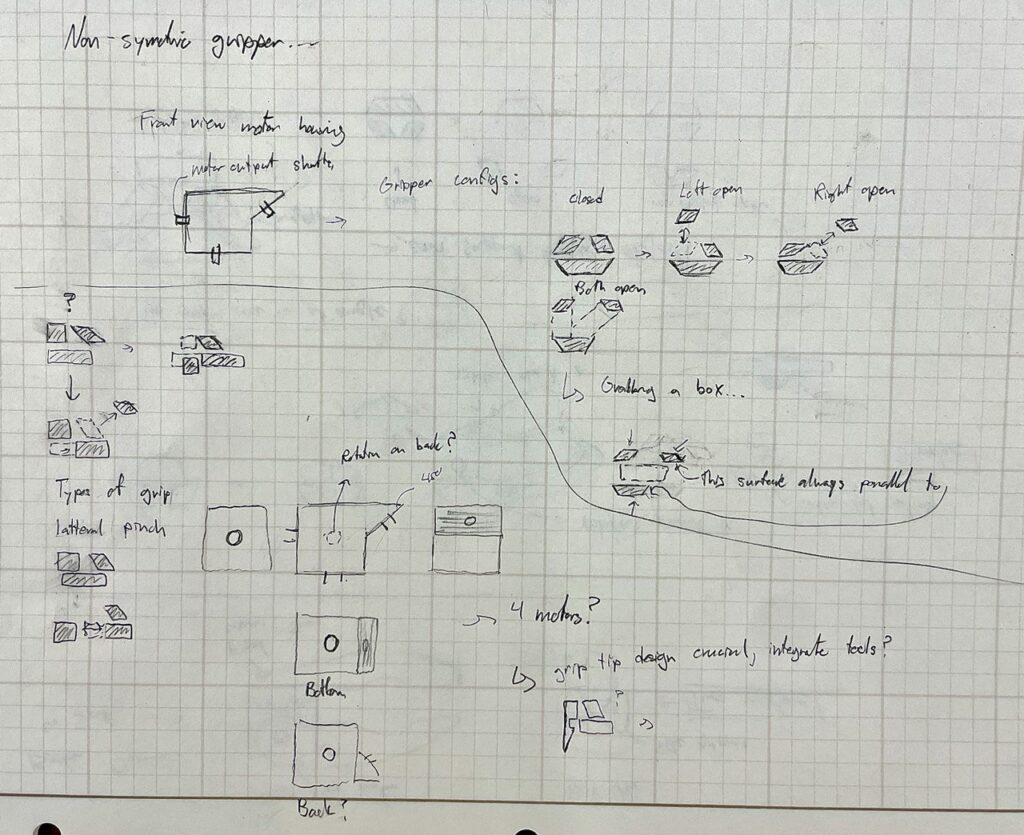
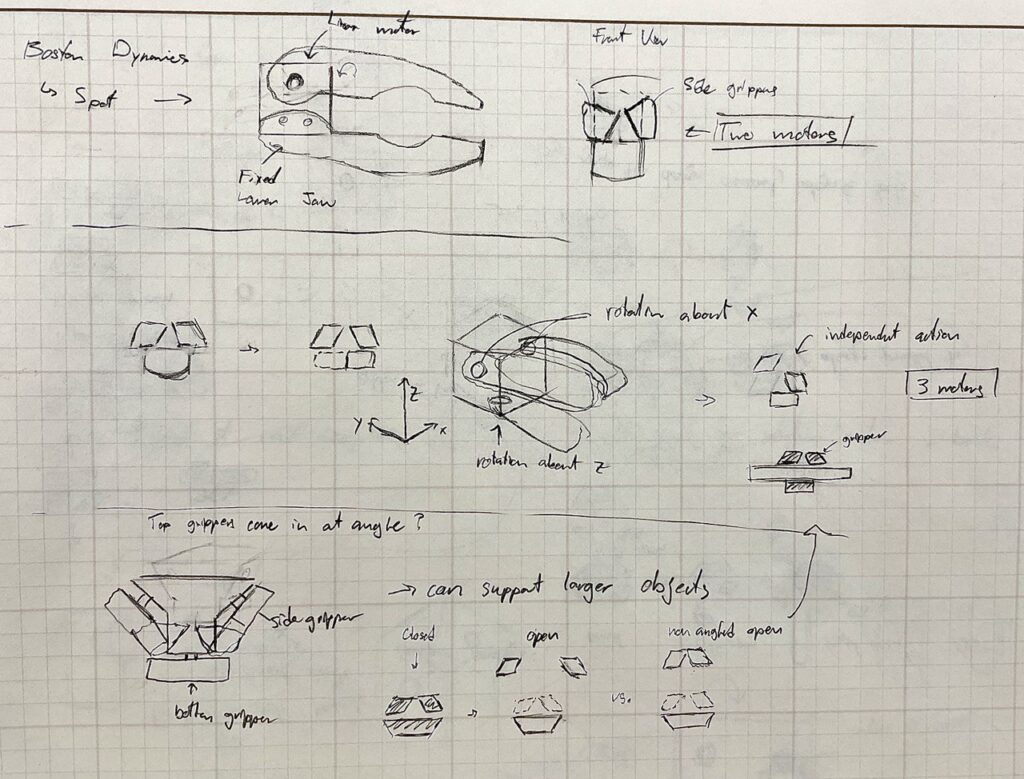
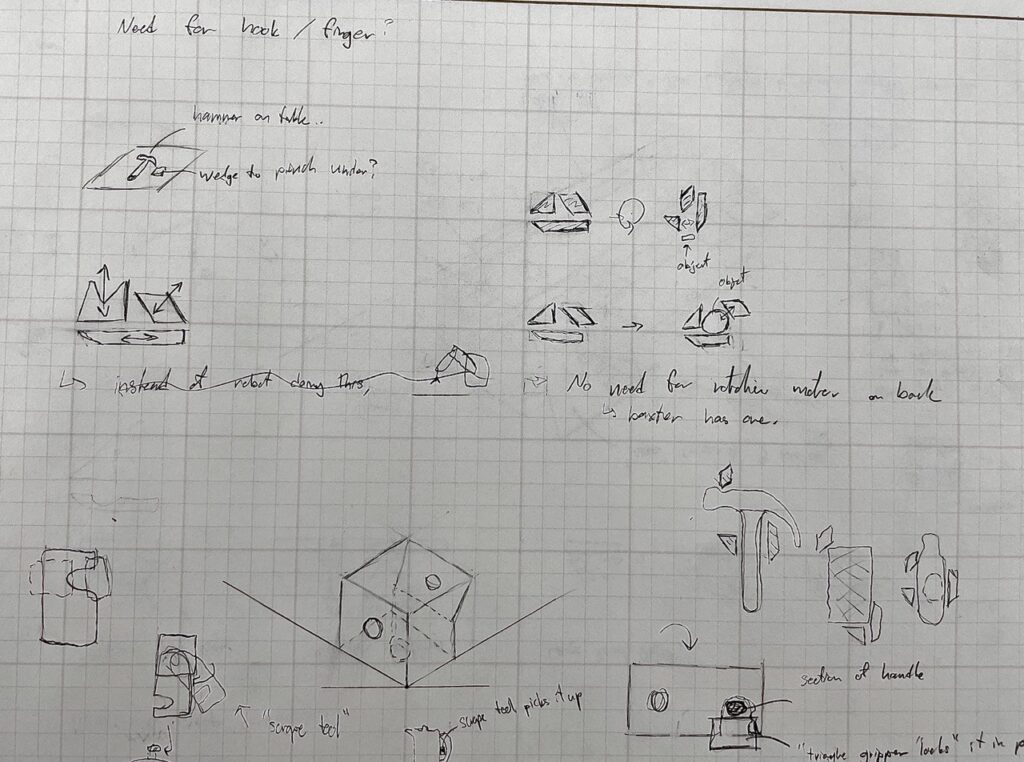
Concept Selection – Sketches
Early Sketches: