Authors:
Aeden Angelone, Arlo Gow, Christian Voloshen, Delainey Hebble
Mentor:
Dr. McAleavey, Dr. Seidman
Abstract:
Lung bronchoscopies are integral procedures in investigating and sampling lung cancer. While such procedures offer important information to the patient and physician, they also pose a risk to these stakeholders as industry standard involves the use of ionizing radiation for real-time imaging during the procedure via fluoroscopy. Eliminating this risk motivates the interest of our customer MedtronicTM in a new real-time visualization system, and ultrasound has arisen as a promising alternative. However, ultrasound historically struggles with resolution, and particularly needle visualization. This in mind, the motivation of this project is to prove the efficacy of ultrasound visualization with biopsy needle recognition for lung bronchoscopy. After literature reviews, it was initially hypothesized that some form of needle excitation coupled with Doppler ultrasound would improve needle recognition. To verify this hypothesis, a motor apparatus capable of spinning and linearly actuating a needle was designed. Tests were then conducted in food-grade gelatin, gelatin made from agar, and porcine lungs while recording with Doppler ultrasound. A statistical analysis was performed with a spinning needle in the gelatin made from agar, where the times to find a biopsy needle with excitation versus without were compared. The times were shown to be statistically significantly different from each other, with a corresponding p value of 0.03. While such a result was promising in a phantom, when the spinning needle was placed in the porcine lungs it commonly caused excess twisting of local tissue, and failed to yield any meaningful results.
Project Objective: Improve the efficacy of an ultrasound real-time imaging mechanism that would be used during a lung bronchoscopy procedure.
Project Trajectory: Improve needle localization through the use of a needle excitation mechanism, allowing for clearer visualization of the needle through doppler.
Background
Introduction
- Lung cancer is the second most common form of cancer for both men and women[1].
- In the current year, it is estimated that over 230,000 people will be diagnosed with lung cancer in the United States[1].
- Of these people, a significant amount will be diagnosed by bronchoscopy: a process that involves threading an endoscope probe into a patient’s airway to view or collect biopsies from the lungs.
- Details about this method:
- Inherently invasive procedure
- Typically involves radiation exposure via fluoroscopy, which has many documented cases of the ionizing radiation from fluoroscopy causing skin damage and tissue necrosis[2]
- Fluoroscopy is used in short “bursts”, exposure is heavily reliant on experience of the surgeon[2].
- Ultrasound-guided Bronchoscopies are a more newly developed technique that prove to solve a lot of these issues.
- However, ultrasound typically suffers from poor needle visualization and resolution, posing difficulties.
[1] Markham, Sarah K et al. “Surface Texturing Design to Enhance Echogenicity of Biopsy Needles During Endoscopic Ultrasound Imaging.” Ultrasound in medicine & biology vol. 46,9 (2020): 2453-2463. doi:10.1016/j.ultrasmedbio.2020.04.034
[2] Fred A Mettler, Titus R Koenig, Louis K Wagner, Charles A Kelsey, “Radiation injuries after fluoroscopic procedures,” Seminars in Ultrasound, CT and MRI, Volume 23, Issue 5, 2002, Pages 428-442, ISSN 0887-2171
Our Design
The initial objective of this project was to determine the optimal imaging modality for real-time, radiation-free lung visualization during a bronchoscopy procedure. Following an extensive literature review, our team determined that ultrasound imaging was the most promising modality due to its real-time visualization, lack of radiation exposure, and price. To refine our project’s focus, our team sought to find ways of improving the ultrasound image output and therefore its efficacy for this use. One limitation we encountered was difficulty with needle localization due to the acoustic deflection off of the needle. From this we generated our problem statement:
Problem Statement: Prove the efficacy of ultrasound visualization with biopsy needle recognition for lung bronchoscopy.
To address this issue, our team designed a needle excitation system to actuate and spin the biopsy needle, which generates a doppler response and clearly defines the needle location with respect to the desired biopsy region. Additionally, we decided to explore other post-processing techniques in order to further delineate the needle and the surrounding healthy and tumor tissue.
Initial Prototypes:
- Piezo Prototype:
- Designed to vibrate needle whose movement would be picked up on Doppler
- Obtained a doppler velocity from this, but movements were too small to be represented visually
- Drill Prototype:
- Needle attached in drill chuck and spun in jello
- Power Doppler used to visualize needle
- Clear visualization of needle, but drill motor tore up jello phantom
- Motor Prototype:
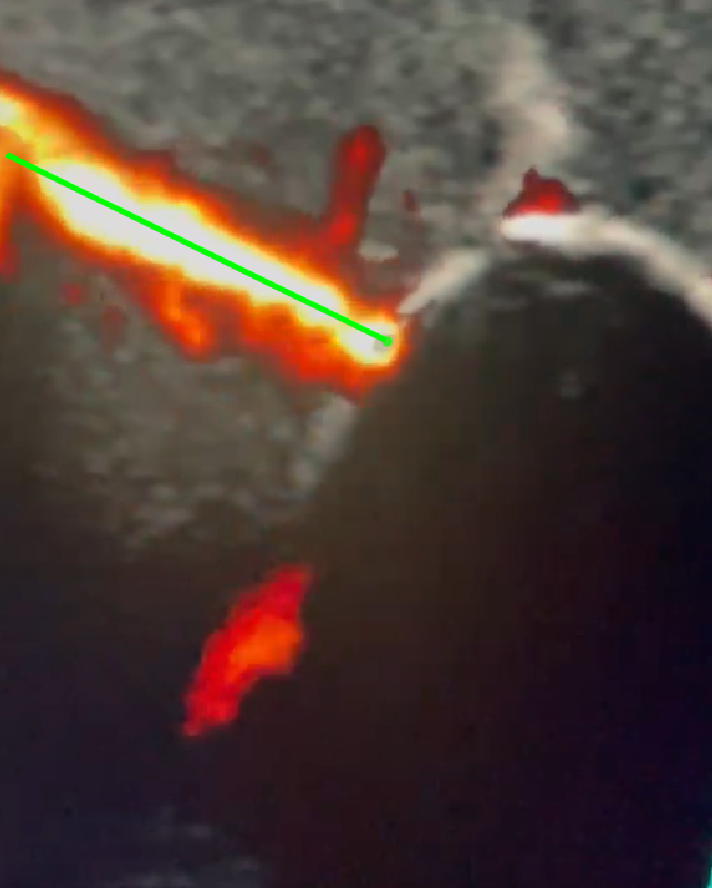
- Clear line of needle when visualized with power doppler
- MATLAB post processing used to determine line of action of needle
- Polyvinyl Alcohol Cryogel used for testing
- Minimal damage to phantom
Final Design
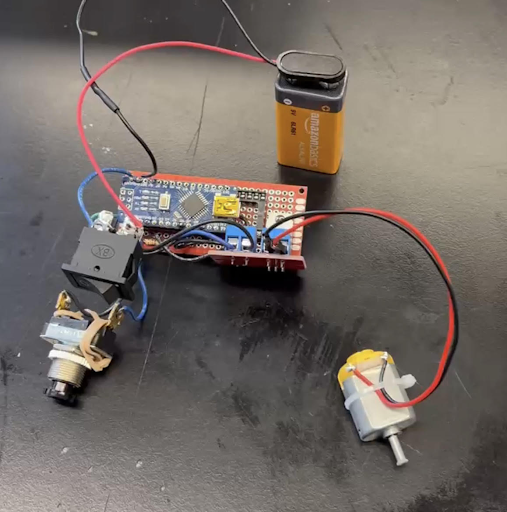
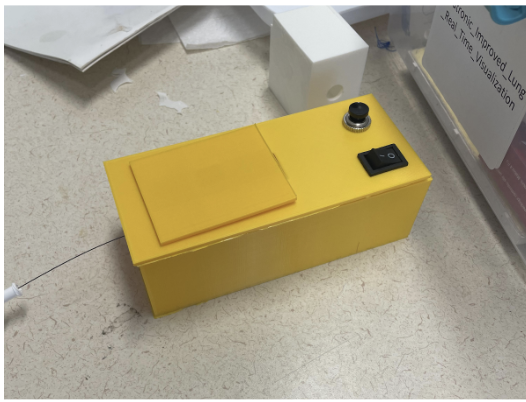
Our final device, depicted in Figure 6 below, uses a motor that is powered by a mosfet driver module and controlled by the pulse-width modulation of an Arduino NANO, all of which was powered by a 9 volt battery. The mosfet allows for precise control of the rotational speed while also allowing a 9 volt input, impossible with only the Arduino, to increase the potential output of the motor. The NANO is activated with a momentary push button. A momentary switch was selected to prevent extended periods of rotation, which otherwise is at risk of generating excesive heat inside of the cannula and damaging our instruments.
The motor is fitted to the handle of a biopsy needle provided to us by our customer with heat shrink tubing. This created a reliable friction fit, which was strong enough to allow for repeated testing but impermanent enough to allow for needles to be swapped in case of breaking or contamination (the former of which occurred repeatedly). The components are housed inside of a 150x150x350 mm box. The box was made with PLA on an Ultimaker 2+ Extra printer and is depicted in final form by shown below.
Analysis
Image Processing:
Computer vision has a wide range of applications in this project. Because of the clean signal received from the rotating of the needle, feature detection is quite easy. For the post-processing in this project, the Computer Vision Toolbox in MATLAB was used. Specifically, the detectMSERfeatures() function, which incrementally steps through the intensity range of the input image to detect stable regions[6], was able to adequately produce a centerline through the needle. From here, other annotation functions were used to show depth in real time and display the needle tip. Future directions could include more extensive computer vision algorithms as well as hardware like field programmable gate arrays (FPGA) to enhance and quicken the process.
The MathWorks, (2024).Computer Vision Toolbox. Natick, Massachusetts, United States. Retrieved from https://www.mathworks.com/help/vision/ref/detectmserfeatures.html
Statistics of Finding a Needle
To test the efficiency of our design in terms of locating the needle during a biopsy, our team conducted an experiment in which each team member was put to the task of finding the needle within a phantom model through only the use of the Ultrasound image output. Each member conducted a trial with and without needle excitation, and the speed in which they found the needle was recorded.
Results:
- The excitation factor was found to have a p-value of .0326, which is less than .05 and therefore statistically significant, meaning that the needle excitation greatly improved the speed of locating the needle.
- In terms of the sum of squares, while the different person conducting the experiment was found to contribute to approximately 13% of the result variation, the excitation mechanism was found to contribute to approximately 72% of the variation.
- This further emphasizes the impact of needle excitation on needle localization.
- 15% of the variation is due to error.
Lung Tissue Testing
The final trial conducted involved testing the device in pig lungs to determine how tissue would respond to the excitation as well as how the ultrasound image would appear compared to previously tested phantoms.
Results:
- The tissue itself would twist around the needle
- The air pockets within the lung made it difficult to visualize what was happening interiorly with the needle excitation
Conclusion
Although ultrasound imaging provides a real-time, non-ionizing alternative to fluoroscopy imaging during bronchoscopy, there are challenges associated with needle localization in relation to the desired biopsy region. Needle excitation was shown to produce visually promising results in terms of improved needle localization during experiments conducted in an agar phantom. One test comparing needle localization speed with and without the excitation mechanism found a statistically significant difference, indicating that needle excitation improves the speed of needle recognition. However, when the same experiments were attempted in porcine lung tissue, it was seen that both the ultrasound visualization and needle excitation process were hindered by the properties of biological tissue. Further testing in lung tissue is necessary to ensure this method will not compromise the integrity of the lung tissue due to torsion.